
La división de robótica de Google
Lo que Google toca evoluciona y en este caso podemos afirmar que BD ha dado un vuelco a la movilidad autonoma de todo tipo de unidades robóticas, tanto bipedos como cuadrupedos. La movilidad, agilidad, destreza y velocidad de estos robots es algo nunca visto y estamos seguros de que muy pronto podremos ver esta tecnologia aplicada en objetos de consumo.
Google trabaja en su Terminator.
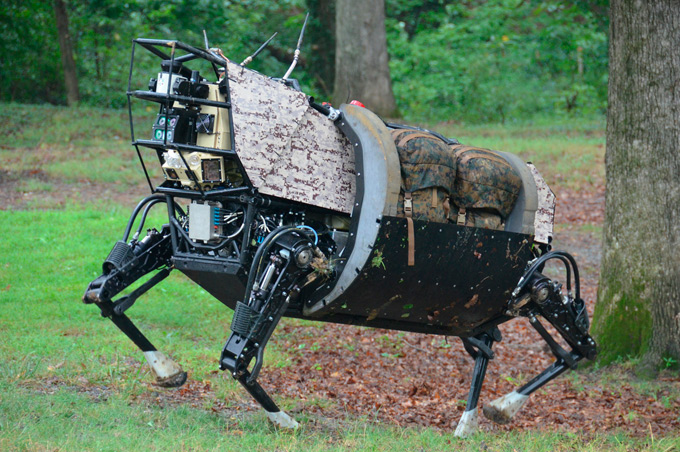
Los trabajos de BD se centran en la movilidad autónoma de los dipositivos todo terreno basados en patas,
Unidades que se deplazan de forma autónoma siguiendo a un lider o en modo exploracion
para habrir camino por terrenos complicados.
Las pruebas que esta realizando la empresa demuestran que sus artilujios consiguen mantener
el equilibrio de formas muy eficientes en terrenos muy variados.
Es de suponer que Google ha encargado a Boston Dynamics la parte de movilidad y
detección de obstaculos para mas adelante incorporar un cerebro elaborado en otros
laboratorios que se encargue de la ineligencia artificial y la comunicacion hablada.
Boston Dynamics es una empresa de ingeniería y robótica, fundada en 1992 por el ingeniero Marc Raibertque que se especializa en la construcción de robots. En diciembre de 2013 fue comprada por Google no conocemos la cifra de etsta adquisición. El principal cliente de Boston Dynamics en el momento de la compra era el Ejército de Estados Unidos, con quien tiene pedidos pendientes, que Google se ha comprometido a cumplir. A mitad del 2015 se hablo de que Alphabet estaba intentando deshacerse de su división de robotica y que Toyota estaba interesada en comprar Boston Dynamics.












Expectación mediatica de las nuevas estrellas
Los robots que fabrica Boston Dynamics normalmente se desplazan sobre dos o cuatro patas. Pero Handle tiene ruedas al final de sus dos piernas.
Los robot tenian hasta ahora una apariencia rigida y una forma de caminar torpe que parecia
muy inestable hasta que hemos empezado a ver las creaciones de BD y como un operario empuja al robot intentando tumbarle.
La unidad detecta las iregularidades del terreno, los obstaculos fijos y moviles asi como la trayectoria de estos ultimos,
en funcion de todo esto calcula donde tiene que apoyar el pie en su siguiente paso y donde debe poner el centro de
gravedad para iniciar el siguente paso.
El movimiento de su pie para explorar el suelo que hay delante de él resulta inquietantemente
humano, da un paso y después se corrige mediante movimientos de torso y brazos.
No solo se investiga como caminar con seguridad por distintos entornos sino tambien como
caer de forma segura si no es posible mantener el equilibrio y como minimizar los daños.
